 GDU
GDU
 UUUFLY
UUUFLY DJI
DJI MMC
MMC GDU
GDU XAG
XAG AOLAN
AOLAN KIEL
KIEL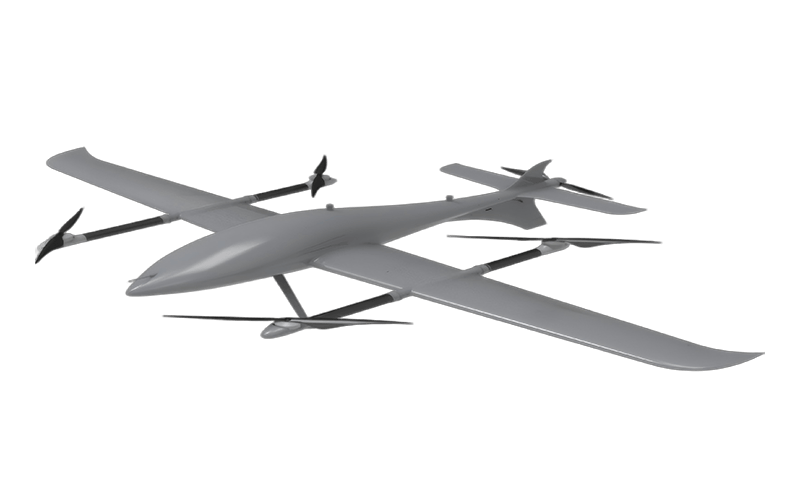 SKY NEXT
SKY NEXT
Dragonfish Standard: Next-Gen Multi Mission eVTOL
Dragonfish Standard Veelzijdige Multi-Mission eVTOL UAV
Evenwichtige duurzaamheid, flexibele laadcapaciteit en snelle inzetbaarheid voor industriële en openbare veiligheidstoepassingen.

Dragonfish Standard Veelzijdige Multi-Mission eVTOL UAV
Evenwichtige duurzaamheid, flexibele laadcapaciteit en snelle inzetbaarheid voor industriële en openbare veiligheidstoepassingen.
Stille vlucht
De Dragonfish bereikt een ultrastille vlucht dankzij zijn uitzonderlijke aandrijfsysteem en innovatieve geluidsreducerende ontwerp. Nauwelijks hoorbaar boven 120 meter boven de grond*, waardoor het risico op detectie aanzienlijk wordt verkleind en operationele geheimhouding wordt gewaarborgd.
Meer informatie >>

Stille vlucht
De Dragonfish bereikt een ultrastille vlucht dankzij zijn uitzonderlijke aandrijfsysteem en innovatieve geluidsreducerende ontwerp. Nauwelijks hoorbaar boven 120 meter boven de grond*, waardoor het risico op detectie aanzienlijk wordt verkleind en operationele geheimhouding wordt gewaarborgd.
Meer informatie >>
Superieure anti-interferentie
In complexe omgevingen behoudt de UAV uitzonderlijke prestaties op het gebied van communicatie en videotransmissie, met sterke anti-interferentiemogelijkheden en stabiele, betrouwbare transmissie.

Superieure anti-interferentie
In complexe omgevingen behoudt de UAV uitzonderlijke prestaties op het gebied van communicatie en videotransmissie, met sterke anti-interferentiemogelijkheden en stabiele, betrouwbare transmissie.
Waarom kiezen professionals voor Dragonfish Standard?

Bescherming tegen GNSS-verlies
Bij gebruik in omgevingen zonder GNSS activeert de UAV de landingsbeveiliging en daalt automatisch af vanaf de huidige positie om de veiligheid te garanderen.
Retourneren bij lage batterijspanning
Gebruikers kunnen het verwachte batterijniveau bij de landing aanpassen. De drone berekent in realtime het optimale terugkeermoment op basis van het huidige batterijniveau en de vluchtstatus, zodat de landing gegarandeerd is met een batterijniveau dat dicht bij de door de gebruiker ingestelde drempel ligt.
Terugkeer na signaalverlies
Als het signaal tussen de UAV en het grondstation wordt onderbroken, wordt de beveiliging tegen verbindingsverlies geactiveerd. Als er GNSS-signalen beschikbaar zijn, start de UAV automatisch de terugkeer naar het startpunt.
Noodhandmatige override

Meerdere redundanties, ter waarborging van de missieveiligheid
Zelfcontrole met één tik
Voert automatisch een systeemcontrole uit vóór het opstijgen, waardoor elke vlucht veilig en betrouwbaar is.
Terugkeren met één druk op de knop
Keer eenvoudig terug naar het startscherm via de Home-knop. Handig op te bergen: snel en gemakkelijk te organiseren na de vlucht, eenvoudig op te bergen en klaar voor volgend gebruik.
Intelligente tracking

Opstijgen en landen van een mobiel platform
Specificaties van Dragonfish Dragonfish Standaard
| Specificatie | Details |
| Type | Kantelrotor multifunctionele eVTOL UAV |
| Afmetingen | 1948 × 3295 × 520 mm (inclusief propellers) |
| Gewicht | 7,5 kg (incl. 2 accu's, propellers; excl. gimbal-payload) |
| Maximale laadcapaciteit | 1,5 kg |
| Maximale vliegtijd | 126 minuten (met standaard laadvermogenconfiguratie) |
| Maximale horizontale snelheid | 120 km/u |
| Maximale horizontale snelheid | 126 km/u (35 m/s) |
| Maximale windweerstand | 15 m/s (vliegtuig met vaste vleugels), 12 m/s (verticale vluchtmodus) |
| Maximale serviceplafond | 5000 meter boven zeeniveau |
| Bedrijfstemperatuur | -20°C tot 50°C |
| IP-classificatie | IP43 |
| GNSS-ondersteuning | GPS + GLONASS + BeiDou + Galileo (positionering met meerdere constellaties) |
| Maximaal signaalzendbereik | 30 km |
| Implementatietijd | ≤5 minuten (montage zonder gereedschap en snelsluiting) |
Groottevergelijking

Accessoires

Dragonfish grondstation

Autel Smart Antenne Transmissie (ASAT) (Optioneel)

Autel Drakenvisnest (Optioneel)

Dragonfish Repeater (Optioneel)
Adaptatieproduct

Kustbestrijding tegen smokkel

Politiehandhaving

Bosbrandpreventie

Inspectie van hoogspanningsleidingen

Verkeerscontrole




